GeoWerkstatt-Projekt des Monats September 2024
Projekt: AutoMap: Ein Wegweiser für die Zukunft des autonomen Fahrens
Forschende: Hamza Alkhatib, Mohamad Wahbah
Projektidee: AutoMap – Entwicklung eines robusten Positionierungssystems für autonome Fahrzeuge auf der Grundlage erfasster Umgebungsinformationen und GNSS/IMU-Daten
Projektidee
Autonome Fahrzeuge (AV) sind keine Zukunftsvision mehr, sondern rücken immer näher an die Realität heran. Schon heute erhalten wir beim Autofahren immer mehr Unterstützung durch Assistenzsystem. Damit vollkommen selbständig fahrende Fahrzeuge sicher und effizient unterwegs sein können, müssen sie jederzeit genau wissen, wo sie sich befinden. Häufig wird dazu auf Satellitensignale zurückgegriffen. In Städten können diese Signale allerdings durch Gebäude und andere Strukturen leicht gestört werden. Hier setzt das Projekt „AutoMap“ an und entwickelt eine innovative Lösung für dieses Problem.
Warum herkömmliche Methoden oft nicht ausreichen
In vielen Lebensbereichen verlassen wir uns auf GPS und ähnliche Systeme, um unseren Standort zu bestimmen. Diese Systeme nutzen Signale von Satelliten, um unsere Position auf der Erde zu berechnen. Doch in Städten gibt es ein Problem: Hohe Gebäude und enge Straßen können die Signale blockieren oder so stark reflektieren, dass sie ungenau werden. Für ein selbstfahrendes Auto, das sich sicher durch den Verkehr bewegen soll, ist das ein großes Risiko. Deshalb braucht es eine zusätzliche Möglichkeit, seine Position genau zu bestimmen.
Die Idee hinter AutoMap
Das Projekt AutoMap setzt auf eine intelligente Kombination verschiedener Technologien, um die Position eines autonomen Fahrzeugs präzise und zuverlässig zu bestimmen. Dazu wird das Fahrzeug mit einem sogenannten Multisensorsystem (MSS) ausgestattet. Dieses System nutzt verschiedene Sensoren, um die Umgebung des Fahrzeugs genau zu erfassen.
So funktioniert das Multi-Sensor-System
Das MSS besteht aus drei Hauptkomponenten: einer inertialen Messeinheit (IMU), einem LiDAR und Kameras.
- IMU (Inertialmesseinheit): Diese misst die Bewegungen des Fahrzeugs, wie Beschleunigungen und Drehraten. Dadurch kann das System schätzen, wie weit sich das Fahrzeug von der zuletzt bestimmten Position entfernt hat und wo die aktuelle Position ungefähr liegt.
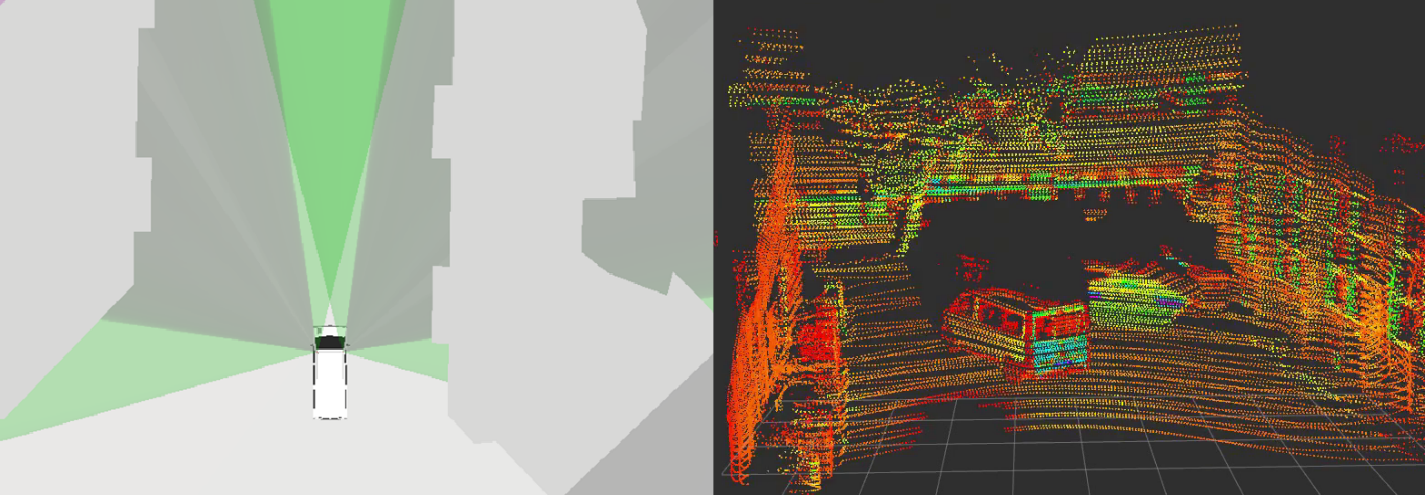
- LiDAR: Dieser Sensor sendet Lichtimpulse in die Umgebung aus und misst, wie lange sie brauchen, um von einem Objekt zurückzukommen. Auf diese Weise erstellt der LiDAR ein detailliertes dreidimensionales Bild der Umgebung, sogenannte Punktwolken.
- Kameras: Sie erfassen visuelle Informationen, die dabei helfen, Gebäude und andere markante Punkte in der Umgebung zu identifizieren.
Die gesammelten Daten werden anschließend von einer Künstlichen Intelligenz (KI) ausgewertet. Die KI filtert unerwünschte Informationen heraus und erkennt Gebäude entlang der Fahrzeugstrajektorie.
Der Einsatz von LoD2-Karten
Um die genaue Position des Fahrzeugs zu bestimmen, vergleicht das System die erkannten Gebäude mit einer speziellen Karte, den sogenannten LoD2-Karten. Diese Karten sind vereinfachte, aber sehr genaue dreidimensionale Darstellungen von Gebäuden, die aus Bauplänen und Laserscans erstellt werden. Sie sind für diesen Zweck ideal, da sie genügend Details bieten, um zuverlässig verwendet zu werden, und gleichzeitig effizient verarbeitet werden können.
Das Kalman-Filter: Feinabstimmung der Position
Die von der IMU geschätzte Fahrzeugposition wird durch die erkannten Gebäude und die LoD2-Karten weiter verfeinert. Hier kommt das Kalman-Filter zum Einsatz. Dieses mathematische Verfahren fusioniert die verschiedenen Datenquellen und gleicht eventuelle Unsicherheiten aus. Das Ergebnis ist eine präzise Positionsbestimmung in Echtzeit.
Zusammenfassung
Das Projekt AutoMap zeigt, wie durch die Kombination moderner Technologien wie LiDAR, Kameras und künstlicher Intelligenz autonome Fahrzeuge in die Lage versetzt werden können, sich auch in komplexen urbanen Umgebungen sicher und präzise zu orientieren. Statt sich ausschließlich auf Satellitensignale zu verlassen, nutzt AutoMap zusätzlich Umgebungserkennung und spezielle Karten, um eine robuste und zuverlässige Positionsbestimmung zu ermöglichen. Dies ist ein wichtiger Schritt auf dem Weg zu sicheren autonomen Fahrzeugen, die uns in naher Zukunft durch unsere Städte führen könnten.